
一、矩阵乘积态与Tensor-Train 分解
1.1 矩阵乘积态与Tensor-Train 概念
矩阵乘积态(Matrix Product State,简称MPS)是一种用于表示量子多体系统的方法,特别在量子信息、量子计算和凝聚态物理领域中得到广泛应用。它是一种张量网络的表示方法,用于描述量子态以及其演化过程。
Tensor Train分解是一种用于分解多维张量的方法,类似于矩阵分解,但适用于更高维度的数据。它将一个多维张量分解成一系列的小块(或称为核),每个小块是一个低秩张量,它们相互连接组成一个网络。这种分解允许高效地表示和操作高维数据,同时保留了重要的数据结构和特征。
阵乘积态主要应用于量子物理领域,用于描述量子态的性质和演化,而Tensor-Train 分解更广泛地应用于机器学习、数值计算等领域,用于处理高维数据的表示和计算。
\varphi_{s_0s_1···s_{N-1}}=\sum_{\{a_*\}} \prod_n^{N-1}A^{(n)}_{a_ns_na_{n+1}}I_{a_0a_N}\\
=\sum_{\{a_*\}}A^{(0)}_{a_0s_0a_1} A^{(1)}_{a_1s_1a_2}···A^{(N-2)}_{a_{N-2}s_{N-2}a_{N-1}}A^{(N-1)}_{a_{N-1}s_{N-1}a_{N}}
其中,
\varphi \in \R^{s_0 \times s_1 ···\times s_{N-1}}是一个 N 阶张量,表示被分解的矩阵。它的每一个索引s_i对应于该张量在第 i 个维度上的index。N表示该张量的阶数,即它有多少个维度。\{a_*\}是一组索引,表示在张量乘法的过程中,每个小张量核A^{(n)}和I所连接的方式。A^{(n)}_{a_ns_na_{n+1}}是一个三维张量,其中n是索引,a_n,s_n和a_{n+1}是张量在不同维度上的索引。这些维度有特定的尺寸,其中\chi是一个参数,用于控制张量核的秩(rank)。A_{a_ns_na_{n+1}}\in \R^{\chi \times d \times \chi},其中,d是物理维度,\chi是虚拟维度(关系到了我们需要压缩的系数)d表示每个维度有多少数据N表示张量的阶数,即它有多少个维度。
从维度方面看待,维度的变化如下:
\R^{d^N}=\R^{
[(1 \times d \times \chi)\times (\chi \times d \times \chi)··· (\chi \times d \times 1)]
}
也就是说,从原来的单一的\R^{d^N} 分解到N-2个\R^{\chi \times d \times \chi} 和 \R^{1 \times d \times \chi} 和一个\R^{\chi \times d \times 1}的矩阵
1.2 为什么它可以压缩?
我们假设她的物理维度为d ,虚拟维度为\chi 则原来矩阵的空间复杂度为\varphi
(d \times d ··· d)\sim O(d^N)
而分解后的空间复杂度为A
2d\chi+(N-2)d\chi^2 \sim O(Nd\chi^2)
也就是说,通过分解我们将空间复杂度从O(d^N) 降到 O(Nd\chi^2) ,当\chi 一定时,存储的空间复杂度从指数级别降低到线性级别,而有了A我们就可以得到\varphi 所以就达到了压缩的目的。
1.3 图形化表示乘积态
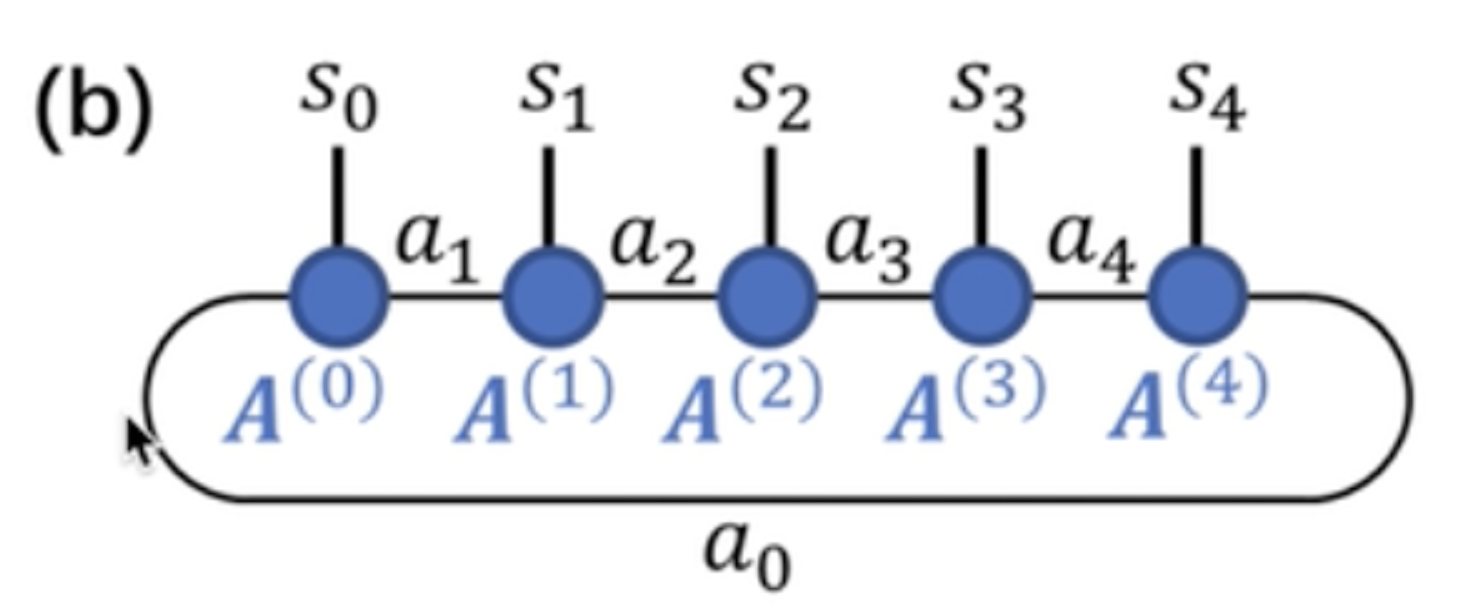
这个图像中,蓝色表示矩阵,其他符号表示指标。也就是说s_0 、 a_1 作用在A^{(0)} 上面,图形无法知道作用顺序,如上面是一个循环的乘积态,所以也称为闭边界。共同作用的指标是可以被消除的(爱因斯坦求和中的左边共有指标),最后得到的是不可被消除的指标作用于最后结果之上(爱因斯坦求和中的右边部分)
二、中心正交化(Center Orthogonalization)
在张量网络表示中,特别是像Tensor Train(TT)和Matrix Product States(MPS)这样的方法中,张量之间的正交性对于高效表示和计算至关重要。中心正交化是一种将张量网络中的张量重新排列和变换的过程,以便使得一部分信息集中在某个核心(中心)张量中,从而提高表示的紧凑性。
在中心正交化过程中,一开始的张量被分解成一对正交张量,这一对张量分别代表了左边和右边的正交部分。这可以通过奇异值分解(Singular Value Decomposition,SVD)来实现。
对于一些特定的量子算法或数值模拟,正交化可以使计算过程更为高效。比如求二范式则可以求中心的二范式,大大提高效率。
2.1 奇异值分解法分解向量
2.1.1 奇异值分解概念
奇异值分解(Singular Value Decomposition,SVD)是一种常用于矩阵分解和降维的数学方法。给定一个矩阵 M,SVD 将其分解为三个矩阵的乘积:
M = U \Sigma V^\top
其中:
U是一个正交矩阵,其列向量称为左奇异向量。\Sigma是一个对角矩阵,其对角线上的元素称为奇异值。奇异值是按照从大到小排列的。V是另一个正交矩阵,其行向量称为右奇异向量。
在SVD分解中,通常将左奇异向量矩阵 U 和包含奇异值以及右奇异向量的矩阵 V^\top 合并到一起,得到一个紧凑的表示。
具体地,将奇异值矩阵 \Sigma 的非零元素按照从大到小排列,得到一个对角矩阵:
\Sigma = \begin{bmatrix}
\sigma_1 & 0 & 0 & \dots & 0 \\
0 & \sigma_2 & 0 & \dots & 0 \\
0 & 0 & \sigma_3 & \dots & 0 \\
\vdots & \vdots & \vdots & \ddots & \vdots \\
0 & 0 & 0 & \dots & \sigma_r \\
0 & 0 & 0 & \dots & 0 \\
\end{bmatrix}
其中 r 是矩阵 M 的秩,也是非零奇异值的数量。
然后,将左奇异向量矩阵 U 的前 r 列和右奇异向量矩阵 V 的前 r 行提取出来,形成矩阵 C 和矩阵 D:
C = U[:, :r]
\\D = \begin{bmatrix}
\sigma_1 & 0 & 0 & \dots & 0 \\
0 & \sigma_2 & 0 & \dots & 0 \\
0 & 0 & \sigma_3 & \dots & 0 \\
\vdots & \vdots & \vdots & \ddots & \vdots \\
0 & 0 & 0 & \dots & \sigma_r \\
\end{bmatrix} \cdot V^\top[:r, :]
这样,C 包含了矩阵 M 的主要信息,而 D 包含了奇异值和右奇异向量的信息。这种分解在很多应用中都非常有用,例如降维、数据压缩、矩阵近似等。
2.1.2 奇异值TT分解步骤
这对正交张量中的一部分被合并到一个中心张量中,同时保持原始张量的信息。这个过程不断迭代,逐步将信息从左右两侧集中到中心,从而达到中心正交化的目的。具体过程如下:
总体上可以归纳为以下几个步骤:
初始化: 假设你有一个张量网络,其中的张量需要进行中心正交化。初始时,这些张量可能是任意排列的。
奇异值分解(SVD): 选择一个张量,将其分解为两个部分:一个正交的左张量和一个正交的右张量。
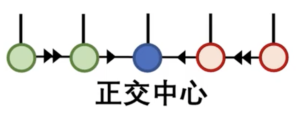
合并到中心: 将其中一个正交张量合并到一个中心张量中。这个中心张量将会积累来自不同张量的信息,从而减少总体的表示复杂度。通常,这个中心张量会处于整个张量网络的中心位置。
迭代: 重复上述步骤,选择下一个需要进行中心正交化的张量,并将其分解为正交左张量和右张量,然后将其中一个合并到中心张量中。这个过程会不断迭代,逐渐将信息从边缘的张量转移到中心张量中。
收敛或截断: 在迭代过程中,你可以选择在某个步骤进行截断操作,即保留部分最重要的特征,丢弃一些较小的值,以减少计算和存储成本。截断后,继续进行迭代,直到整个张量网络足够接近中心正交的状态。
过程大概如下图所示

公式如下:
A^{(n)} \stackrel{SVD}{\rightarrow} \hat{A}^{(n)}SV\\
SV\rightarrow A^{n+1}
这样不断地重复,整体图如下
2.1.3 代码实现
向前传播
d是物理维度,\chi 是虚拟维度,length是分解的长度
中间维度是A_{a_ns_na_{n+1}}\in \R^{\chi \times d \times \chi},头尾是A_{a_ns_na_{n+1}}\in \R^{1 \times d \times \chi}和A_{a_ns_na_{n+1}}\in \R^{\chi \times d \times 1}
import torch as tc
print('建立开放边界MPS')
length, d, chi = 6, 2, 4
dtype = tc.float64
#随机生成A
#第一个和最后一个个的头尾为1,
tensors = [tc.randn(1, d, chi, dtype=dtype)] + \
[tc.randn(chi, d, chi, dtype=dtype)
for _ in range(length-2)] + \
[tc.randn(chi, d, 1, dtype=dtype)]psi = tensors[0]
print('第0个张量的形状为:', tensors[0].shape)
for n in range(1, len(tensors)):
print('第%d个张量的形状为:' % n, tensors[n].shape)
#tensordot用来做通用维度的张量相乘,第一个第二个参数表示输入的张量,最后一个表示要计算的维度
psi = tc.tensordot(psi, tensors[n], [[-1], [0]])
print('收缩完该张量后,所得张量的形状为:', psi.shape)
psi = psi.squeeze()
print('去掉前后维数为1的指标得到最终的高阶张量,形状为:')
print(psi.shape)第0个张量的形状为: torch.Size([1, 2, 4])
第1个张量的形状为: torch.Size([4, 2, 4])
收缩完该张量后,所得张量的形状为: torch.Size([1, 2, 2, 4])
第2个张量的形状为: torch.Size([4, 2, 4])
收缩完该张量后,所得张量的形状为: torch.Size([1, 2, 2, 2, 4])
第3个张量的形状为: torch.Size([4, 2, 4])
收缩完该张量后,所得张量的形状为: torch.Size([1, 2, 2, 2, 2, 4])
第4个张量的形状为: torch.Size([4, 2, 4])
收缩完该张量后,所得张量的形状为: torch.Size([1, 2, 2, 2, 2, 2, 4])
第5个张量的形状为: torch.Size([4, 2, 1])
收缩完该张量后,所得张量的形状为: torch.Size([1, 2, 2, 2, 2, 2, 2, 1])
去掉前后维数为1的指标得到最终的高阶张量,形状为:
torch.Size([2, 2, 2, 2, 2, 2])
分解向量
def ttd_tc(x, chi=-1, svd=True):
"""
:param x: 被分解的张量
:param chi: 维度裁剪. dc=None表示不裁剪,使用QR分解;
如果裁剪则使用 SVD 分解
:param svd: use svd or qr
:return tensors: tensors in the TT form
:return lm: singular values in each decomposition (calculated when dc is not None)
"""
#形状
dims = x.shape
#求数量
ndim = x.ndimension()
#记录第一维度的大小
dimL = 1
tensors = list()
lm = list()
if chi is None:
chi = -1
for n in range(ndim-1):
if (chi < 0) and (not svd): # 不裁剪
#先reshape为前一个向量*维度,也就是说第一维度是有前面的n个向量*目前项链的个数
q, x = tc.linalg.qr(x.reshape(dimL*dims[n], -1))
dimL1 = x.shape[0]
else:
q, s, v = tc.linalg.svd(x.reshape(dimL*dims[n], -1))
#print(q.shape,s.shape,v.shape)
#torch.Size([4, 4]) torch.Size([4]) torch.Size([1024, 1024])
#判断截取的长度不应该大于s的长度
if chi > 0:
dc = min(chi, s.numel())
else:
#向量个数
dc = s.numel()
#截取
#左奇异值截取前dc列
q = q[:, :dc]
#截取前dc行
s = s[:dc].to(q.dtype)
#保存s
lm.append(s)
#右奇异值(s的前dc列的对角元素·v的前dc列)
#print(s.shape,tc.diag(s).shape,v[:dc, :].shape)
#torch.Size([4]) torch.Size([4, 1024])
#diag表示把这列元素填充到对角线上
#[4]-diag->[4,4]
#[4,4]·[4,1024]--mm->[4,1024]
#x是下一个大块
x = tc.diag(s).mm(v[:dc, :])
#print(s)
#print(tc.diag(s))
#print(x.shape)
#torch.Size([dc, 1024]) or torch.Size([s.numel(),1024])
#记录截取数值,为下一个dimL*dims[n]做准备
dimL1 = dc
#记录当前块
tensors.append(q.reshape(dimL, dims[n], dimL1))
#记录截取数值
dimL = dimL1
#记录最后一个
tensors.append(x.reshape(dimL, dims[-1], 1))
# tensors[0] = tensors[0][0, :, :]
return tensors, lm
#这个函数把正交中心移动到最后一个#设定维度
d = 4
x = tc.randn((d, d, d, d,d,d), dtype=tc.complex128)
tensors = ttd_tc(x,chi=-1)[0]
for n in range(len(tensors)):
print('第%d个张量的维数为:' % n,
tensors[n].shape)第0个张量的维数为: torch.Size([1, 4, 4])
第1个张量的维数为: torch.Size([4, 4, 16])
第2个张量的维数为: torch.Size([16, 4, 64])
第3个张量的维数为: torch.Size([64, 4, 16])
第4个张量的维数为: torch.Size([16, 4, 4])
第5个张量的维数为: torch.Size([4, 4, 1])
def full_tensor(tensors):
# 注:要求每个张量第0个指标为左虚拟指标,最后一个指标为右虚拟指标
psi = tensors[0]
for n in range(1, len(tensors)):
psi = tc.tensordot(psi, tensors[n], [[-1], [0]])
if psi.shape[0] > 1: # 周期边界
psi = psi.permute([0, psi.ndimension()-1] + list(range(1, psi.ndimension()-1)))
s = psi.shape
psi = tc.einsum('aab->b', psi.reshape(s[0], s[1], -1))
psi = psi.reshape(s[2:])
else:
psi = psi.squeeze()
return psi
x2 = full_tensor(tensors)
err = (x - x2).norm() / x.norm()
print('全局张量TTD(指标正序)误差 = %g' % err)全局张量TTD(指标正序)误差 = 4.84283e-15
2.2 正交三角(QR)TT分解
这里我们也可以采用QR分解法
转载来源https://zhuanlan.zhihu.com/p/362248020
2.2.1 正交三角(QR)分解的定义
设 \pmb{A}_{m \times n} 的秩为 n ,则\pmb{A} 可以唯一地分解为
\pmb{A}_{m \times n} = \pmb{Q}_{m \times n} \pmb{R}_{n \times n} \\\\
其中,\pmb{Q}_{m \times n} 是标准正交向量组矩阵, \pmb{R}_{n \times n} 是正线上三角阵。
(补充一个小知识:\pmb{Q}其实是源于 orthogonal matrices 或 orthonormal basis,为了避免 \pmb{O},\pmb{0}不好区分的问题; \pmb{R}是指代 right triangular matrices)
2.2.2 正交三角(QR)分解的求法
其实,我们可以直接通过\pmb{Q}^T\pmb{A} = \pmb{R} 得出 \pmb{R}(因为有性质c: \pmb{Q}^T\pmb{Q}= \pmb{E} ,所以\pmb{Q}^T\pmb{A} = \pmb{Q}^T(\pmb{Q}\pmb{R}) = \pmb{E}\pmb{R} = \pmb{R}
综上,得出求解 \pmb{A}_{m \times n} 的正交三角(QR)分解\pmb{A}_{m \times n} = \pmb{Q}_{m \times n}\pmb{R}_{n \times n}的步骤:
第一步:对矩阵\pmb{A}_{m \times n}进行施密特标准正交化,得出矩阵\pmb{Q}_{m \times n} 。
第二步:通过 \pmb{R}_{n \times n} = \pmb{Q}_{m \times n}^T \pmb{A}_{m \times n} 得出矩阵\pmb{R}_{n \times n} 。
2.2.3 例子
求 \pmb{A}_{4 \times 3} 的正交三角(QR)分解,其中
\begin{aligned} \pmb{A}_{4 \times 3} = \begin{bmatrix} 1 & 0 & 0 \\ 1 & 1 & 0 \\ 1 & 1 & 1 \\ 1 & 1 & 1 \end{bmatrix} \end{aligned} \\\\
解:
第一步:对矩阵\pmb{A}_{m \times n}进行施密特标准正交化,得出矩阵\pmb{Q}_{m \times n} 。
对 \pmb{A}_{4 \times 3} 进行正交化,得:
\begin{aligned} \pmb{v}_1 = \begin{bmatrix} 1 \\ 1 \\ 1 \\ 1 \end{bmatrix}, \pmb{v}_2 = \begin{bmatrix} -3 \\ 1 \\ 1 \\ 1 \end{bmatrix}, \pmb{v}_3 = \begin{bmatrix} 0 \\ -2/3 \\ 1/3 \\ 1/3 \end{bmatrix} \end{aligned} \\\\
单位化,得:
\begin{aligned} \pmb{Q}_{4 \times 3} = \begin{bmatrix} 1/2 & -3/\sqrt{12} & 0\\ 1/2 & 1/\sqrt{12} & -2/\sqrt{6} \\ 1/2 & 1/\sqrt{12} & 1/\sqrt{6} \\ 1/2 & 1/\sqrt{12} & 1/\sqrt{6} \end{bmatrix} \end{aligned} \\\\
第二步:通过\pmb{R}_{n \times n} = \pmb{Q}_{m \times n}^T \pmb{A}_{m \times n}得出矩阵 \pmb{R}_{n \times n} 。
\begin{aligned} \pmb{R}_{3 \times 3} &= \pmb{Q}_{4 \times 3}^T \pmb{A}_{4 \times3} \\\\ &= \begin{bmatrix} 1/2 & 1/2 & 1/2 & 1/2\\ -3/\sqrt{12} & 1/\sqrt{12} & 1/\sqrt{12} & 1/\sqrt{12} \\ 0 & -2/\sqrt{16} & 1/\sqrt{6} & 1/\sqrt{6} \end{bmatrix} \begin{bmatrix} 1 & 0 & 0 \\ 1 & 1 & 0 \\ 1 & 1 & 1 \\ 1 & 1 & 1 \end{bmatrix} \\\\ & = \begin{bmatrix} 2 & 3/2 & 1 \\ 0 & 3/\sqrt{12} & 2/\sqrt{12} \\ 0 & 0 & 2/\sqrt{6} \end{bmatrix} \end{aligned} \\\\
**解毕。
求 \pmb{A}_{5 \times 3} 的正交三角(QR)分解,其中
\begin{aligned} \pmb{A}_{5 \times 3} = \begin{bmatrix} 1 & 2 & 5 \\ -1 & 1 & -4 \\ -1 & 4 & -3 \\ 1 & -4 & 7 \\ 1 & 2 & 1 \end{bmatrix} \end{aligned} \\\\
解:
第一步:对矩阵\pmb{A}_{m \times n} 进行施密特标准正交化,得出矩阵\pmb{Q}_{m \times n} 。
对\pmb{A}_{5 \times 3}进行正交化,得:
\begin{aligned} \pmb{v}_1 = \begin{bmatrix} 1 \\ -1 \\ -1 \\ 1\\ 1 \end{bmatrix} , \pmb{v}_2 = \begin{bmatrix} 3 \\ 0 \\ 3 \\ -3\\ 3 \end{bmatrix}, \pmb{v}_3 = \begin{bmatrix} 2 \\ 0 \\ 2 \\ 2\\ -2 \end{bmatrix} \end{aligned} \\\\
单位化,得:
\begin{aligned} \pmb{Q}_{5 \times 3} = \begin{bmatrix} 1/\sqrt{5} & 1/2 & 1/2 \\ -1/\sqrt{5} & 0 & 0 \\ -1/\sqrt{5} & 1/2 & 1/2 \\ 1/\sqrt{5} & -1/2 & 1/2 \\ 1/\sqrt{5} & 1/2 & -1/2 \end{bmatrix} \end{aligned} \\\\
第二步:通过\pmb{R}_{n \times n} = \pmb{Q}_{m \times n}^T \pmb{A}_{m \times n} 得出矩阵 \pmb{R}_{n \times n}。
\begin{aligned} \pmb{R}_{3 \times 3} &= \pmb{Q}_{5 \times 3}^T \pmb{A}_{5 \times3} \\\\ &= \begin{bmatrix} 1/\sqrt{5} & -1/\sqrt{5} & -1/\sqrt{5} & 1/\sqrt{5} & 1/\sqrt{5} \\ 1/2 & 0 & 1/2 & -1/2 & 1/2 \\ 1/2 & 0 & 1/2 & 1/2 & -1/2 \end{bmatrix} \begin{bmatrix} 1 & 2 & 5 \\ -1 & 1 & -4 \\ -1 & 4 & -3 \\ 1 & -4 & 7 \\ 1 & 2 & 1 \end{bmatrix} \\\\ & = \begin{bmatrix} \sqrt{5} & -\sqrt{5} & 4\sqrt{5} \\ 0 & 6 & -2 \\ 0 & 0 & 4 \end{bmatrix} \end{aligned} \\\\
留言